


Hi all,
To add to Arne's posts on the QHY600 CMOS, I have recently taken delivery of a QHY183M and have started doing some tests. My focus is exoplanet photometry so I'm interested in how the peculiarities of CMOS will impact this high precision work. I'll get to the usual business of linearity etc but I've started looking at Random Telegraph Signal (RTS) because there is so little in the literature on this.
All of the following analysis was done with Python programs I wrote.
I took a set of 200 bias (actually very short exposure dark) frames. From these 100 pairs of frames were randomly selected. One frame from each pair is then subtracted from the other. A histogram of a typical result is shown below:
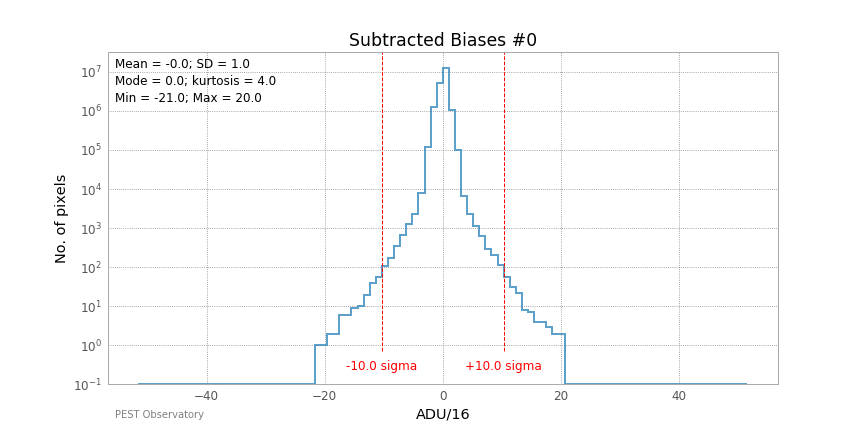
Clearly non-gaussian. Many pixels have scatter that exceed 10-sigma. For my current CCD (ST-8XME), almost none exceed 5-sigma.
For each of these 100 bias-pairs I identified those pixels that exceed 10-sigma. From this list (of 9,500 pixels) the worst pixels were selected, and their ADU levels in each of the 200 bias frames plotted. Below is how one of these bad pixels behaved through the series.
![]()
This is typical RTS. 3 distinct levels, clustered around 10 ADUs above and 10 ADU below the offset level. Some of the bad pixels have their discrete levels at +/- 4 ADU instead.
A more thorough description, and more plots are on my website: http://pestobservatory.com/cmos-for-photometry/
but in summary:
1) The QHY183 does show RTS
2) There are identifiable bad pixels - this means it will be possible to devise a software fix
3) But more testing is needed to see how these bad pixels behave with longer exposures, and in light frames.
I'll post more as I do these tests.
TG
Of course the ultimate practical test of the performance of this and other cameras is to undertake transformed photometry of photometric standard stars, callibrated with good darks and flats (and bias and flat-darks if you so choose), and look at the accuracy and precision of a number of determinations of magnitudes on a number of stars of various colours, using ensemble photometry.
When I find that a sensor has good linearity and can achieve better than 0.01 mag accuracy in V for most measurements using regimes such as the above, I don't worry too much about other characteristics.
Roy
Continuing the testing, I have now looked at how these RTS pixels behave in darks and light frames.
Some conclusions:
For my setup, I calculate that the impact on bright star photometry will be in the order of 1 ppm, which is insignificant for any ground based telescope.
Just for info here are the plots of ADU for sets of 200 dark, and light frames.
More info here: http://pestobservatory.com/rts-pixel-behaviour/
I like Roy's point of view. However you seem to have a 3-state system rather than a two-state system:
Not sure why you selected your methodology, but the result looks like 2 or 3 states. Perhaps, the middle band serves as a normal? I suppose that the pixels are large enough to have many point defects so that capture and emission can produce many ADUs. Your result does look Lorentzian, which suggests 1/F or pink noise. Also the scatter in the +/-10 ADU line suggests that the RTS noise is merging to 1/F noise and that there are multiple ADCs and differing defects in pixels.
In very small electronic devices the alternate capture and emission of carriers at an individual defect site generates discrete switching in the device resistance.
It might be useful to demonstrate RTS with a single pixel. Perhaps many pixels becomes 1/F noise.
Also RTS is dependent on temperature, so you may include that in your test parameter list.
RayTRE
Sorry, I should have been clearer that the plot are for individual pixels. The plot follows a single pixel over many frames, with near constant lighting.
From what I have read, the RTS is due to individual pixel defects. Prior to doing these tests I knew they were there, from other reports, but I was not able to asses how they would affect high precision photometry.
From these tests I am now confident that even at the ppt level the impact is small.
RTS is probably dependent on temperature, but I am doing the tests at -5 C, the temperature I intend to run at. It's not as low as I can go, but even at this temperature the dark noise is low enough that it will be swamped by other noise sources (sky, target shot noise). It can get pretty warm here and I want to keep a margin so that I can run at the same settings all year.
TG
What is the gain and offset setting of the camera for these experiments?
Thx,
George
The Gain was set to 0, and Offset to 8 on the ASCOM driver.
I've chosen these because I want max well depth, which Gain=0 gives, and the Offset is just high enough so that there will not be any negative values.
Those are the nominal setting numbers, but in practice they translate to gain = 3.78 e-/ADU and a bias level of 32 ADU (both of these are in terms of the 12-bit real output, as opposed to the 16-bit ADU actually output, which is just the real ADU multiplied by 16).
TG
Some more tests.
Yes there is amp glow... A master dark from the combination of 40 x 120s frames.
But the key question is whether dark subtraction of light frames effectively removes this, and any hot pixels.
Below is a histogram of a 120s light frame. There are numerous hot pixels evidenced by the bars at the right of the plot.
And with dark subtraction these hot pixels, and most outliers have gone. Below the histogram of the same frame dark subtracted.
So this sensor behaves well under dark subtraction.
More details here: http://pestobservatory.com/cmos-dark-frames/
Adding test results on linearity. In particular I want to see exactly where saturation starts.
I used a pulsed LED run from an Arduino Uno, as Arne recommends. Here's the full chart with the saturation roll-over.
And this, restricted to the region up to 3,500 ADU. (12-bit ADU, i.e. ADU output by camera/16).
Linearity over the range is very good. To see exactly where saturation starts, I plot the residuals against the straight line.
There are +-4 ADU residuals across the range. This may not be intrinsic to the sensor, but maybe to slight changes in the test equipment as the test went on (eg the LED, or diffuser may have the changed position slightly). It's not apparent from the full chart, but the residuals show that saturation starts at about 3,300 ADU.
I've also measured the gain to be 3.78 e-/ADU, so the full well for this sensor is 12,500 e-. QHY quotes 15,500 e- full well, which is equivalent to 4,100 ADU. From my tests the ADUs hardly get to 4,000, and the rollover starts way below this.
More details: http://pestobservatory.com/linearity/
I'm looking for a new camera, so seeing these test results and explanations is great. Please do keep posting your notes on these tests. When you get around to measuring photometry, let us know how it goes.
Will do. I'm now working on writing a binning tool for use post acquisition. It's pretty poor that Sony thought it a good idea to pad 12 bit data and present it as 16 bits. Then if you bin using the provided applications, it adds rather than averages, resulting in an artificial saturation. A numerical saturation, rather than a physical one!
TG
Can you publish the electronic circuit you used to study the linearity of the camera and the diode model.
The circuit diagram, code and photo of the test setup is here: http://pestobservatory.com/linearity-test-circuit/
TG
Thanks.
The QHY183M has a 12-bit ADU (0-4,095) but inflates the output to occupy a 16-bit range (0-65,535) through multiplying by 16.
No dynamic range is gained by doing this, but it has big drawbacks if you want to bin because the camera driver will add all binned pixels together and cap the result if it exceeds 65,535.
Consider 4 adjacent pixels each at 2,000 12bit-ADU, in the middle of its full well. If we set 2×2 binning the driver will add all 4 ADUs together, then multiply by 16. This should give 128,000 but of course the output FITS file is restricted to 16 bit integers. So instead of 128,000 what is output is 65,535. We have ‘digital saturation’, whereas the physical pixels are still well within their usable range, and lost dynamic range.
To get around this I wrote a post acquisition binning tool. With 20 million pixels to deal with using a 'for' loop would have been very slow. But I found this nice algorithm and am able to do 2x2 binning on 200 frames in 4 mins on my ancient Pentium processor.
But should I do binning with all frames off the camera, or only bin the calibrated science frame just before photometry? Or quite a few strategies in between. Because I am not yet on sky (they sent the wrong OAG!) I can only test darks.
I've come to the conclusion that binning early, or late does not make much difference to the result. But binning early, of all lights, darks, flats raw frames, will be easier to implement.
Here are some histograms supporting my conclusion:
A master 120s dark combined from 40 binned raw darks, showing lots of hot pixels.
Below are 2 histograms of the same 120s light frame. The first has been dark subtracted using the master dark frame above (ie bin then combine into a master). The 2nd one was dark subtracted unbinned (unbinned light, master dark combined from unbinned raws).
In both hot pixels have been almost completely removed, leaving just 2 (out of 20m!). There is a tiny bit of evidence that calibrating unbinned leaves the image cleaner. The Mean of the lower plot is 1 ADU lower. I think this is because the master dark combine routine I use (in C-Munipack) does some outlier rejection and may well have eliminated some RTS pixel effects.
But overall a good result. A practical binning solution that preserves dynamic range, quicker processing times, and clean dark subtraction.
More details here: http://pestobservatory.com/binning/
I have now fully commissioned the QHY183M and have done exoplanet observations with it for several months. So it's time to wrap up this series summarising its performance. The full report is on this page.
Here's an observation with a possible transit, achieving per 120s point precision of 2.7 mmag.
This precision is very close to theory, starting from the photon shot noise of the star, sky, flat fielding, differential photometry, and finally scintillation. The chart below is calculated cumulative precision (or noise), read from left to right so that the rightmost bar includes all noise sources.
So there is no evidence of any feared 'CMOS effects' (eg RTS pixels, amp glow, darks not subtracting out fully) contributing to noise. It's not apparent from the chart, but the effect of read noise is insignificant. Most of the noise comes from sky photons and scintillation.
However the precision achievable is not as good as my old ST8-XME. Even though both cameras have about the same peak QE (~85%), the QHY183M has its peak at around the V-band. But most stars put out more light around the R band. Below is relative flux from a star with B-V = 0.6. Even with the higher QE at the V band, the detected flux (and therefore precision) is still highest at Rc.
Conclusion
A sound sensor for high precision photometry, but I wish its QE was higher in R band!
TG
Just saw that the images didn't load correctly. Not sure how to fix this. Seemed to work before...
Thanks
Hi.... I'm pondering blending an IMX183 cam with a RASA 11 ( 620mm fl and ~2.2 micron spot size ). The camera pixel size ( 2.4 microns ) impeccably coordinates with the telescope spot size ( 2.2 microns ), which could yield some astonishing goal. I'm expecting to utilize the IMX183/RASA combo for high goal planetary cloud imaging.